
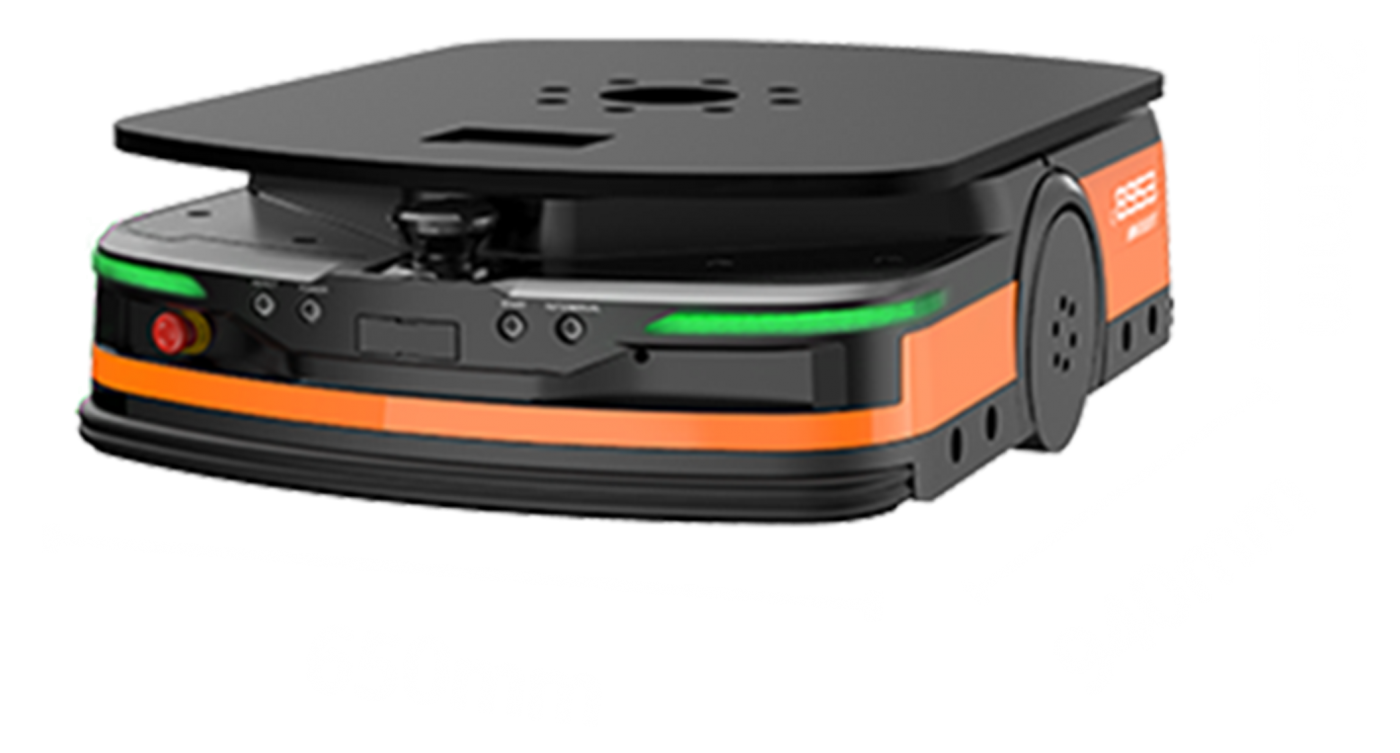
LMR (Latent Mobile Robot) เป็นหุ่นยนต์เคลื่อนที่อัตโนมัติ (AMR) ที่มาพร้อมระบบยกขึ้น-ลง รองรับการจัดการคลังสินค้า และการยกสินค้าได้อย่างมีประสิทธิภาพ ด้วยการออกแบบที่เหมาะสมกับการใช้งานในอุตสาหกรรมหลากหลาย ช่วยเพิ่มความปลอดภัย ลดต้นทุน และปรับปรุงกระบวนการทำงานให้ดียิ่งขึ้น
หุ่นยนต์เคลื่อนที่อัจฉริยะ LMR : ขับเคลื่อนธุรกิจของคุณไปข้างหน้าอย่างมั่นใจ

High-performance, Safety and Multiple Types

Multi-certifications
LMR ได้รับการรับรองมาตรฐานจากหน่วยงานชั้นนำระดับสากล เพื่อความมั่นใจในคุณภาพและความปลอดภัยสำหรับการใช้งานทุกประเภท

Flexibility
ปรับเปลี่ยนรูปแบบการทำงานได้ตามความต้องการ รองรับการใช้งานในหลายสถานการณ์และอุตสาหกรรม

Full range safety protections
ติดตั้งระบบป้องกันความปลอดภัยที่ครอบคลุมทุกมิติ เพื่อป้องกันอุบัติเหตุและเพิ่มความมั่นใจในการปฏิบัติงาน
Wide application
ออกแบบให้รองรับการใช้งานในหลายอุตสาหกรรม เช่น การผลิต โลจิสติกส์ และคลังสินค้า



ตัวแทนจำหน่ายหุ่นยนต์ แบรนด์ Hikrobot
Automation Service เราเป็นตัวแทนแบรนด์หุ่นยนต์ชั้นนำระดับโลก Hikrobot พร้อมให้บริการโซลูชั่นอัตโนมัติครบวงจร เพื่อเพิ่มประสิทธิภาพ และลดต้นทุนให้กับธุรกิจ ด้วยเทคโนโลยีที่ทันสมัย | ทีมงานผู้เชี่ยวชาญพร้อมให้คำปรึกษา แนะนำ และออกแบบระบบหุ่นยนต์เพื่อตอบโจทย์ธุรกิจของคุณ

Specification : LMR (LATENT MOBILE ROBOT)
| Dimension L*W*H (mm) | 940*650*253 |
| Rated Speed (m/s) | 2.0 |
| Max. Rotation Speed (°/s) | 200 |
| Position Accuracy (mm) | ±10 |
| Charging Time (h) | ≤1.5 |
| Driving Mode | Differential Drive |

Rated Load (kg)

Weight (kg)
Lifting Height (mm)

Rotation Diameter (mm)

Navigation

Endurance (h)

Rated Speed (m/s)
Charging Time (h)
| Dimension L*W*H (mm) | 1180*860*265 |
| Rated Speed (m/s) | 1.8 |
| Max. Rotation Speed (°/s) | 180 |
| Position Accuracy (mm) | ±10 |
| Charging Time (h) | ≤2 |
| Driving Mode | Differential Drive |
Rated Load (kg)
Weight (kg)
Lifting Height (mm)
Rotation Diameter (mm)
Navigation
Endurance (h)
Rated Speed (m/s)
Charging Time (h)
| Dimension L*W*H (mm) | 1180*860*265 |
| Rated Speed (m/s) | 1.5 |
| Max. Rotation Speed (°/s) | 120 |
| Position Accuracy (mm) | ±10 |
| Charging Time (h) | ≤2 |
| Driving Mode | Differential Drive |
Rated Load (kg)
Weight (kg)
Lifting Height (mm)
Rotation Diameter (mm)
Navigation
Endurance (h)
Rated Speed (m/s)
Charging Time (h)
| Dimension L*W*H (mm) | 1150*820*265 |
| Rated Speed (m/s) | 2.0 |
| Max. Rotation Speed (°/s) | 200 |
| Position Accuracy (mm) | ±10, ±1 |
| Charging Time (h) | 1.5 |
| Driving Mode | Differential Drive |
Rated Load (kg)
Weight (kg)
Lifting Height (mm)
Rotation Diameter (mm)
Navigation
Endurance (h)
Rated Speed (m/s)
Charging Time (h)
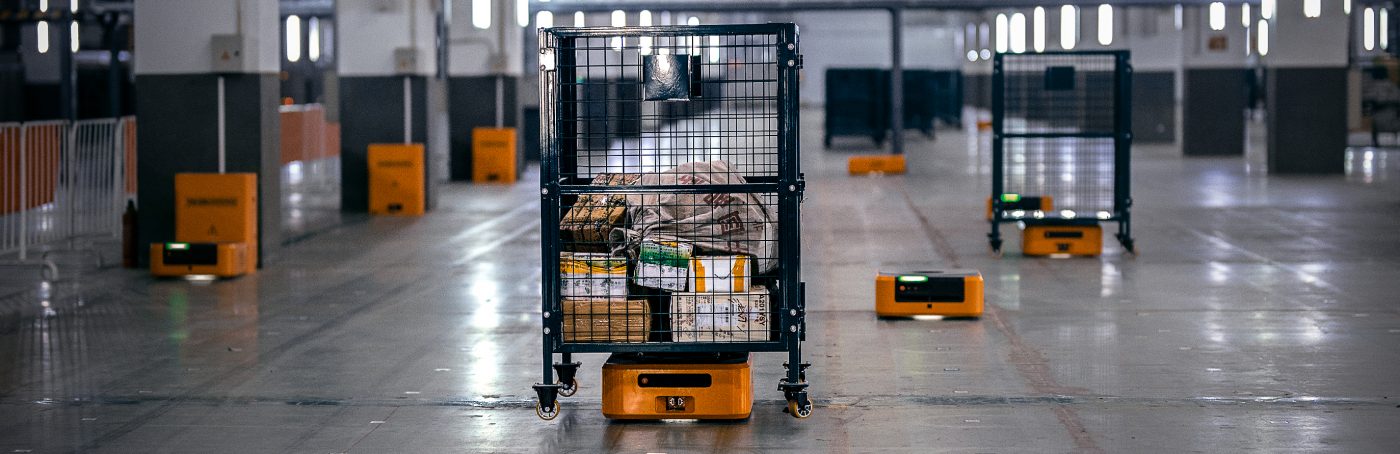
ตัวอย่างรูปแบบระบบการทำงานของ
LMR และ Good to person (GTP)
- สถานที่จัดเก็บของและสถานีหยิบของอยู่คนละบริเวณ เป็นรูปแบบการใช้ AGV ยกชั้นแร็คเก็บของเพื่อเคลื่อนย้ายมายังเจ้าหน้าที่ซึ่งประจำการอยู่ที่สถานีจัดของ ทำการหยิบจัดสินค้าจากชั้น แสกนบาร์โค้ดเพื่อตัดจากระบบและนำลงจุดจัดแยกของ หลังจากจบกระบวนการหยิบของ AGV จะนำชั้นแร็คกลับไปเก็บนะจุดวาง
- รูปแบบการดำเนินงานแบ่งแยกตามสถานที่จัดเก็บ เช่น กลุ่มสินค้า A ให้เจ้าหน้าที่หยิบจาก Flow rack และ กลุ่มสินค้า B,C ใช้ระบบหุ่นยนต์ AGV ดำเนินการยกของมายังสถานีจัดของ (GTP Method) หรือ Picking Station



ตารางเปรียบเทียบประสิทธิภาพของรูปแบบการจัดเก็บและการหยิบสินค้า
(Storage & Picking Flow comparison)
| High Rack | Hikrobot GTP | Flow Rack | |
|---|---|---|---|
| ปริมาณการจัดเก็บ ในพื้นที่จำกัด | สูง | ต่ำ | ต่ำ |
| ต้นทุนค่าแรง | สูง | ต่ำ | ต่ำ |
| ประสบการณ์ที่ต้องใช้ในการทำงาน | สูง | ต่ำ | ต่ำ |
| ประเภท SKU | น้อยกว่า | หลากหลาย | ปานกลาง |
| ปริมาณ SKU | สูง | ปานกลาง | ปานกลาง |
| ความถี่ในการหยิบ | ต่ำ | ปานกลาง | สูง |
| ความยืดหยุ่นในรูปแบบการทำงาน | ยกทั้งพาเลท | กลุ่มสินค้า B, C | กลุ่มสินค้า A |

ระบบการทำงานแบบ
Good to Person ของหุ่นยนต์
- AGV ทำหน้าที่ยกชั้นวางของไปยังสถานที่จัดเก็บ
- AGV ทำหน้าที่ยกชั้นแร็คมายังสถานี Picking ตามคำสั่งเบิก PO หรือ SO
- เจ้าหน้าที่ทำการหยิบสินค้าออกจากชั้นและแสกนบาร์โค้ดเพื่อตัดสต็อคออกจากระบบ
- ระบบ RCS (Robot Control System) สามารถเก็บข้อมูลสถิติการหยิบ เพื่อแนะนำตำแหน่งการเก็บชั้นแร็คที่เหมาะสมสอดคล้องกับข้อมูลสถิติ
- ข้อมูลคำสั่งการเดินทางถูกสั่งการจาก RCS โดยอัตโนมัติ ซึ่งมีการทำงานเชื่อมต่อระบบ ERP, WMS MES ของลูกค้า
Application : การใช้หุ่นยนต์เคลื่อนที่ LMR ในธุรกิจอุตสาหกรรม
สำหรับอุตสาหกรรมยานยนต์ (Automobile)

- ให้โซลูชันหุ่นยนต์เคลื่อนที่ที่ปลอดภัยและเชื่อถือได้ เพื่อเพิ่มประสิทธิภาพด้านโลจิสติกส์ และลดต้นทุนแรงงาน
- ระบบเหมาะสมสำหรับการใช้งานในสายการผลิต เช่น การกดขึ้นรูป การเชื่อม และการประกอบในโรงงานผลิตหลัก
- รองรับการจัดการที่ครบวงจร ด้วยแพลตฟอร์มซอฟต์แวร์ที่ช่วยเพิ่มประสิทธิภาพในกระบวนการผลิต
สำหรับอุตสาหกรรมอิเล็กทรอนิกส์สำหรับผู้บริโภค (Consumer Electronics)

- โซลูชันหุ่นยนต์อัจฉริยะและยืดหยุ่นถูกนำไปใช้ในกระบวนการผลิตอุปกรณ์อิเล็กทรอนิกส์ (คอมพิวเตอร์, การสื่อสาร, อุปกรณ์อิเล็กทรอนิกส์)
- ระบบจัดการการเคลื่อนย้ายวัสดุภายในโรงงานแบบอัตโนมัติ ช่วยลดจำนวนแรงงานคน และช่วยเพิ่มประสิทธิภาพการผลิต
สำหรับอุตสาหกรรมการผลิต (Manufacturing)

- การเปลี่ยนแปลงทางเทคโนโลยีและความผันผวนของตลาดเร่งการเปลี่ยนแปลงของผลิตภัณฑ์
- โซลูชันหุ่นยนต์เคลื่อนที่อัจฉริยะและยืดหยุ่นสามารถตอบสนองความต้องการการผลิตที่รวดเร็วและโปร่งใส
- ช่วยให้องค์กรปรับตัวต่อการแข่งขันในตลาดได้อย่างมีประสิทธิภาพ
สำหรับอุตสาหกรรมอีคอมเมิร์ซและค้าปลีก (E-commerce/Retail)

- ด้วยปริมาณงานที่เพิ่มขึ้น อุตสาหกรรมอีคอมเมิร์ซและค้าปลีกต้องการระบบที่รวดเร็วสำหรับการจัดส่ง
- ระบบโลจิสติกส์และคลังสินค้าดั้งเดิมไม่สามารถรองรับความต้องการในยุคอีคอมเมิร์ซได้อย่างเต็มที่
- หุ่นยนต์ LMR ช่วยให้กระบวนการทางโลจิสติกส์เป็นไปอย่างรวดเร็ว ไม่กระจุกตัวจนล้าช้า โดยเฉพาะในช่วงเทศกาล เช่น Black Friday, MID year Sele
สำหรับอุตสาหกรรมอาหารและเภสัชกรรม (Food and Pharmaceuticals)

- อุตสาหกรรมนี้มีข้อกำหนดด้านเวลาและต้องเปลี่ยนแปลงกระบวนการผลิตบ่อยครั้ง
- หุ่นยนต์เคลื่อนที่ LMR ที่มีประสิทธิภาพและความยืดหยุ่น ช่วยตอบสนองความต้องการ พร้อมทั้งมีความปลอดภัยสูง และเป็นไปตามข้อปฏิบัติในกระบวนการผลิตอาหารและยา



หุ่นยนต์เคลื่อนที่อัตโนมัติ สำหรับช่วยในการยก และขนย้ายสิ่งของ กล่องลัง พาเลทสินค้า ฯลฯ ภายในโกดังคลังสินค้า และโรงงานต่างๆ เพิ่มประสิทธิภาพการขนย้าย มีศักยภาพในการยกของที่มีน้ำหนักสูง ทดแทนการใช้แรงงานคนจำนวนมาก ตอบโจทย์ธุรกิจยุคใหม่ ที่ต้องการความรวดเร็วในการขนย้าย ลดต้นทุนในระยะยาว
สินค้าประเภท หุ่นยนต์เคลื่อนที่ AMR – HIKROBOT อื่นๆ

ได้อย่างดีเยี่ยม









